增量式编码器归零:原理与实践
增量式编码器是工业自动化和机械控制中常见的位置传感器,它们用于测量旋转或线性位置,并提供实时反馈以确保精准的位置控制。然而,增量式编码器在开始运行之前通常需要进行归零,以确保准确性。本文将深入探讨增量式编码器的归零过程,包括其原理和实际操作。
增量式编码器的基本原理
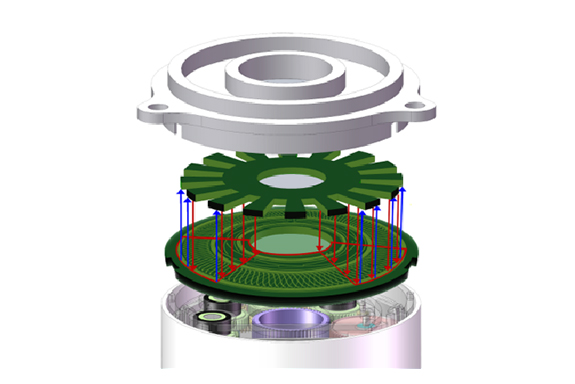
增量式编码器通过将旋转或线性位置转换为电子信号来工作。它们通常由以下关键组件组成:
码盘: 码盘是一个旋转或线性标尺,具有特殊的编码结构。这些结构可以是光学或磁性的,用于生成脉冲信号。
传感器头: 传感器头位于编码器的固定部分,通常与码盘之间存在一定的间隙。传感器头用于读取码盘上的编码结构,并将其转换为电子脉冲信号。
计数器: 计数器是用于记录脉冲信号数量的电子装置。它们将脉冲信号转换为数字计数,表示位置。
增量式编码器的归零过程
增量式编码器的归零过程涉及将位置参考点设置为零,以便测量相对于该点的位置变化。以下是归零的基本步骤:
找到参考点: 在归零之前,需要确定位置的参考点。这通常是机械系统中的一个特定位置,例如机床上的回零开关位置。
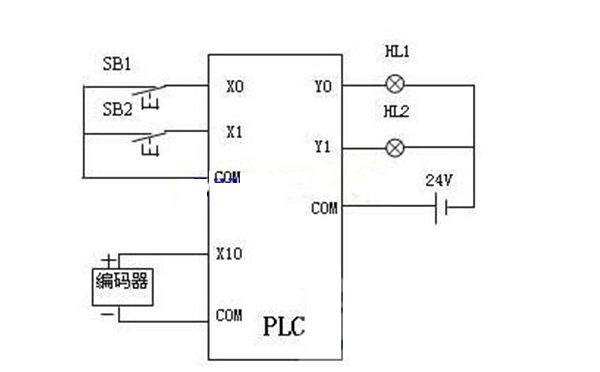
启动编码器: 启动机械系统和编码器。确保编码器正常运行,并开始记录位置。
移动到参考点: 控制系统将机械系统移动到事先确定的参考点。这可以通过手动操作或自动控制来完成。
记录零位置: 一旦达到参考点,记录此位置作为零点。编码器的计数器将被重置为零,表示当前位置是新的零点。
完成归零: 归零过程完成后,编码器现在可以准确地测量相对于零点的位置变化。
归零的应用
归零对于许多应用至关重要,尤其是需要精确定位的自动化系统。以下是一些归零的应用场景:
数控机床: 在数控机床中,归零确保工件在正确的初始位置上进行加工。
机器人: 机器人需要归零以确保它们的末端执行器位于正确的起始位置,以执行任务。
医疗设备: 医疗设备如医用成像设备需要归零,以确保精确的成像和定位。
印刷机: 在印刷行业中,归零确保印刷机在每个作业中都从正确的位置开始。
在工业自动化中,准确的位置控制对于产品质量和生产效率至关重要。因此,归零是确保编码器工作准确的关键步骤。